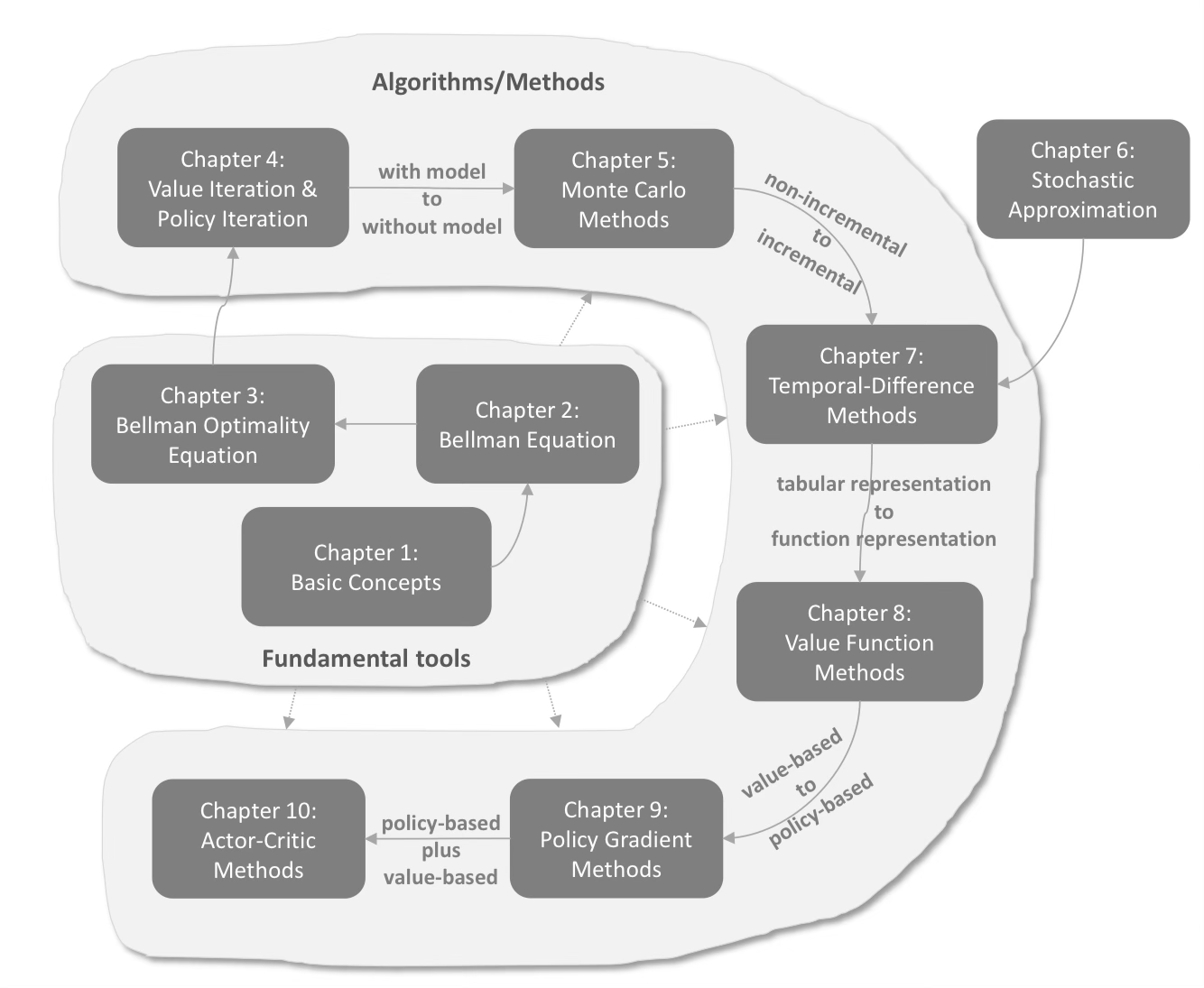
强化学习
本文最后更新于 2025年5月31日 凌晨
基本概念
Eg. Grid
state
state space S
action
action space A(s)
State transition
- forbidden area
Tabular representation: deterministic 因为事实上是三阶张量
State transition probability: all situation
Eg. p(s_2|s_1,a_2)
Policy
π(a_1|s_1)
Tabular representation: fit for all
实现:随机采样
Reward in R(s,a)
Eg. r_bound=-1,r_forbid=-1,r_target=1
table: deterministic
Mathematical: stochastic
Eg. p(r=1|s1,a1)
Hardworking->positive
Trajectories轨迹: a state-action-reward chain
Return of .:sum of reward. use to compare policy
Discount rate γ:balance future ,prevent cycle收敛
Episode :usually finite, have terminal->episodic
Continuing:
Episodic-> continuing: absorbing state or normal state with γ
MDP( Markov decision process )
- sets
- S
- A(s)
- R(s, a)
- Probability distribution
- State transition probability $p(v_f|v_i,a_k)$
- Reward probability $p(r|v_f,a_k)$已考虑末状态和操作,不考虑初状态
- Policy
- π(a|s)也是一种概率
- Markov property与之前的状态无关
When decision is given ->Markov process
Bellman equation
State value: $v_\pi(s)=\mathbb E[G_t|S_t=s]$
Bootstrapping
矩阵形式$v_\pi=r_\pi+\gamma P_\pi v_\pi$
展开形式
$$
v_\pi(s)=\sum_a \pi(a|s)\sum _r p(r|s,a) r+\gamma\sum_a \pi(a|s) \sum_{s’} p(s’|s,a)v_\pi(s’)=\sum_a \pi(a|s)(\sum _r p(r|s,a) r+\gamma\sum_{s’} p(s’|s,a)v_\pi(s’))
$$
$S_t\xrightarrow{A_t}R_{t+1},S_{t+1}$ random variables
G_t: return of certain trajectory
convergence:Cauchy
随机变量$X|Y,Z\rightarrow p^x_{yz}$,YZ为伪指标,缩并$value^{x}_{yz}$得到期望$\mathbb E_{yz}$
分上下指标或用|或;分隔,从右往左,相同则不缩并,不同则所并~numpy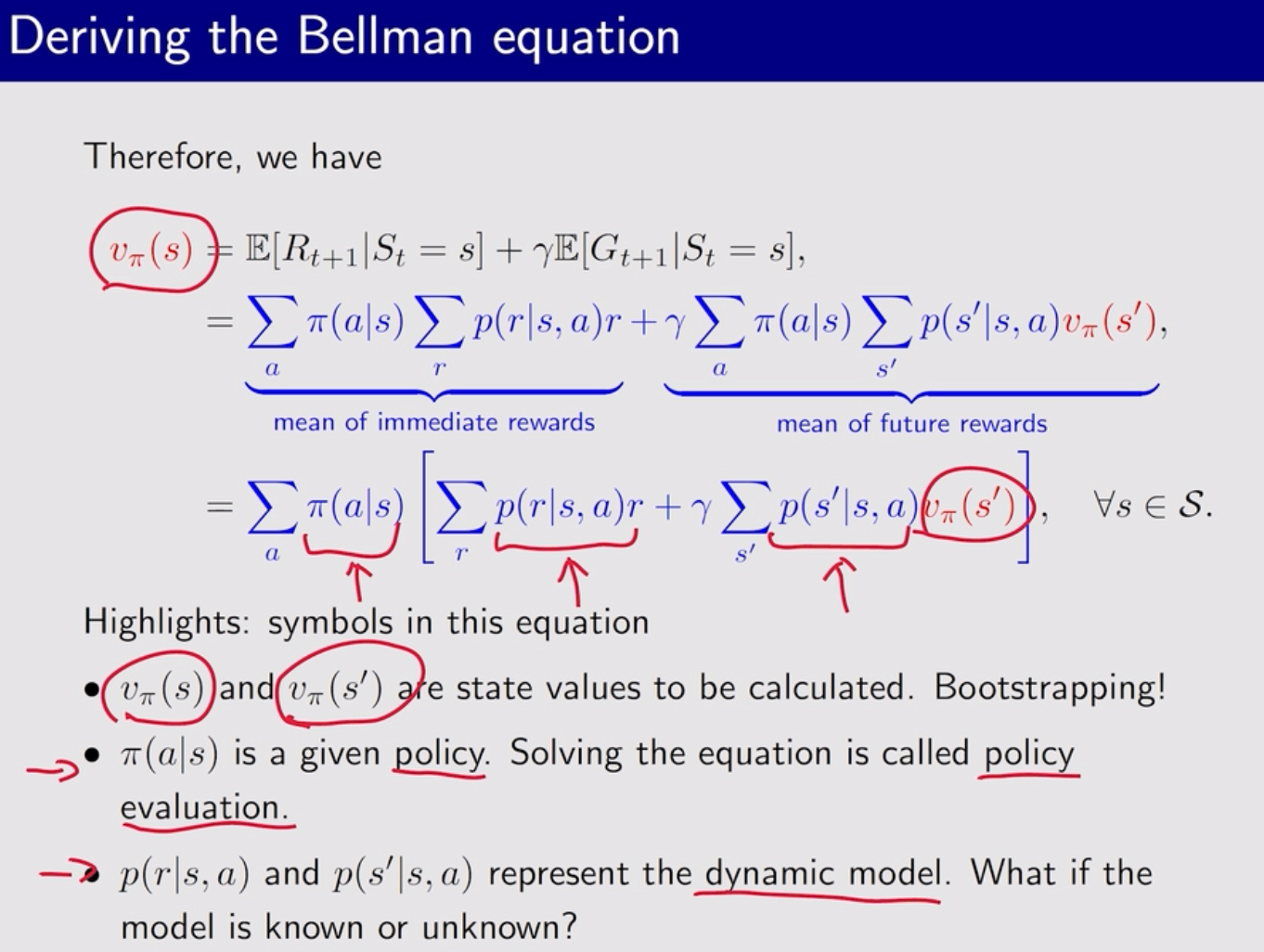
求解Closed-form solution $v=(1-\gamma P)^{-1}r$
iterative solution 收敛
action value $q(s, a) := \mathbb{E} \left[ R_t \mid S_t = s, A_t = a \right]$
table: all situation
$$
v_\pi (s)=\sum_a \pi(a|s)q_\pi(s,a)
$$
$$
q_\pi(s,a)=\sum_r p(r|s,a)r+\gamma \sum _{s’}p(s’|s,a)v_\pi(s’)
$$
不只考虑当前策略的
Bellman optimal equation (BOE)
$$
v(s)=\max_\pi(\sum_a \pi(a|s)\sum _r p(r|s,a) r+\gamma\sum_a \pi(a|s) \sum_{s’} p(s’|s,a)v_\pi(s’))=\max_a \pi(a|s)(\sum _r p(r|s,a) r+\gamma\sum_{s’} p(s’|s,a)v_\pi(s’))
$$
矩阵形式$v_\pi=\max _\pi(r_\pi +\gamma P_\pi v)$
注意括号里面向量v,理论上每个分量是关于π的函数,这里是对π取最值,使每个分量最大。而不是求无穷范数,也并没有引入模长
计算时可能不知道v(s’)需要值迭代等方法
分量是$\pi^a_s c_{sa}$ 固定s,只需找a使$c_{sa}$最大
- how: value iteration
- policy update:先求最大π=argmax … 即最大值对的自变量的值(arguments of the maximum)
- value update:再求v(s)(*)
- Contraction mapping theorem$||f(v_1)-f(v_2)||_\infty\leq \gamma ||v_1-v_2||_\infty$
- existence
- uniqueness
- algorithm: exponential
- deterministic, greedy只选最大的
- γ 减小,短视
- 惩罚 增加
- r->ar+b不变
- 其实越晚到达奖励越少,所以不会扰远路
value iteration &policy iteration
dynamic programming, Model Based RL
policy iteration
- policy evaluation$v_{\pi _k}=r_{\pi _k} +\gamma P_{\pi _k} v_{\pi _k}$
- iterative solution(*)直到误差足够小
- policy improvement$v_{\pi _{k+1}}=\text{argmax} _{\pi }(r_{\pi _k} +\gamma P_{\pi} v_{\pi _k})$
- $v_{\pi _{k+1}}$>$v_{\pi _{k}}$
- converges to an optimal policy
- 接近目标的先训练好
Truncated(截断) policy iteration algorithm
(*)步只进行j次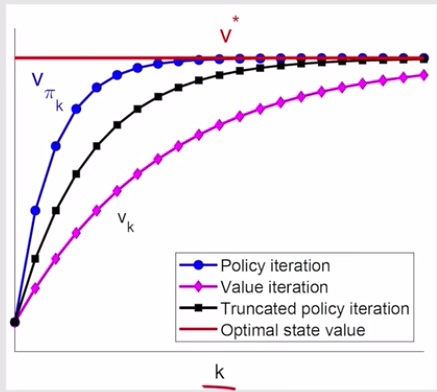
GPI: generalized policy iteration
Monto Carlo Learning
Without model, we need data!
model-free没有p的值,依赖数据(experience)
mean estimation
Law of Large number: $\mathbb E =\mathbb E [ x]$,$Var[\bar X]=\frac 1N{Var}{[X]}$
采样方法
MC basic
- policy evaluation:采样估计q
- episode length
- policy improvement:
MC Exploring Starts
visit::state-action pair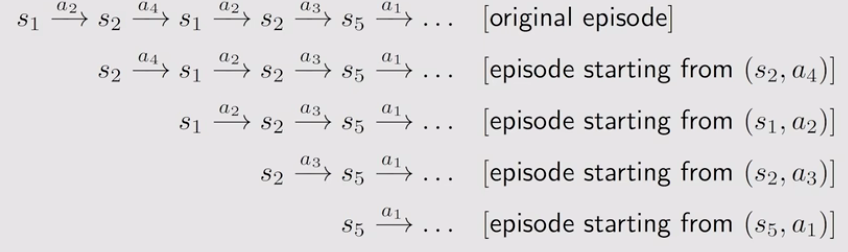
- first visit
- very visit
从后往前
Exploring:遍历
Starts:从每个(s,a)开始
MC ε-Greedy
ε=0最优,逐渐减小
soft policy: stochastic
without Exploring Starts
$$
\pi(a|s) = \begin{cases} 1 - \frac{\epsilon}{|\mathcal{A}|}({|\mathcal{A}|}-1) & \text{if } a = \text{argmax}_a Q(s, a) \ \frac{\epsilon}{|\mathcal{A}|} & \text{if } a \neq \text{argmax}_a Q(s, a) \end{cases}
$$
- 拿出ε均分,剩下的给greedy
exploitation& exploration~[[练习|展示区&学习区]]
π在大π-ε中找,every visit
Stochastic Approximation
incremental
eg. $\bar x$增量式估计$w_{k+1}=w_{k}-a_k(w_{k}-x_{k})$ $a_k=\frac 1n$
$\Delta x = -ae(x)$~梯度下降,负反馈,a:步长
- 鞅论(Martingales)与随机逼近(Stochastic approximation) 保证了随机过程的收敛性
Robbins-Monro algorithm
$g(w)=0$ 不知道g
$w_{k+1}=w_k-a_k\tilde g(w_k,\eta _k)$ $\eta _k$噪声
$\lim w_k=w^*$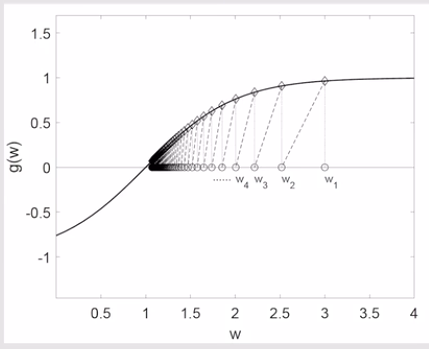
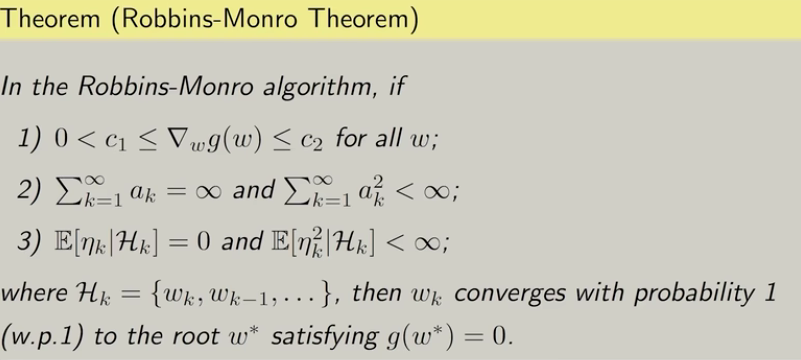
w.p.1: with probability 1=almost surely~测度论XI.1 几乎处处 Almost Everywhere - Skye的文章 - 知乎
- 递增,有界
- g=∇L 找的是损失函数
- 收敛于0,但不太快
- w_1不影响
- eg. 1/k, sufficiently small number
- eg. iid. independent and identically distributed
In general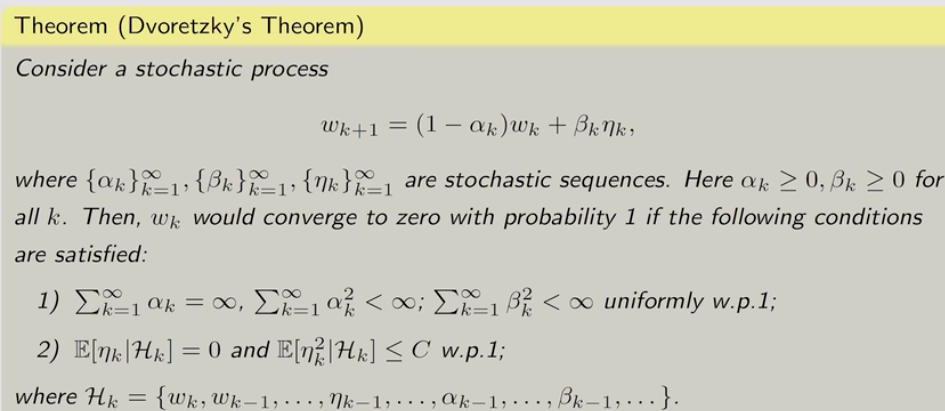
- 允许$\beta$很快收敛到0
- 运用伪鞅:期望不变
- 证明RM:运用中值定理$\Delta g(w)=\Delta w \cdot g’(w)$
- multiple variables:

Stochastic gradient descent
eg. mean estimation
优化$\min_w J(w)=\mathbb E[f(w,X)]$
gradient decent(GD)
let $\nabla_w \mathbb E[f(w,X)]=0$
$$
w_{k+1}=w_k-a_k\nabla_w \mathbb E[f(w_k,X)]=w_k-a_k \mathbb E[\nabla_wf(w_k,X)]=0
$$
batch gradient decent(BGD)
$\mathbb E[\nabla_wf(w,X)]\approx \frac 1n…$
- 函数需要在模型训练之前定义
Stochastic gradient decent(SGD)
$w_{k+1}=w_k-a_k\nabla_w f(w_k,x_k)$
n=1
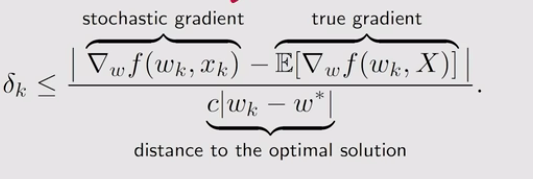
convergence
- SGD is a special RM algorithm
- 较远时收敛较快
deterministic->随机抽取
mini batch gradient decent(MBGD)
m=n时由于随机抽取,任有可能不是全部的
Temporal-Difference Learning
incremental, online, bootstrapping, low estimation variance, bias<->MC无偏估计
$$
q_{t+1}(s_t,a_t)=q_{t}(s_t,a_t)-\alpha_t(s_t,a_t)[q_{t}(s_t,a_t)-(r_{t+1}+\gamma \bar q_t)]
$$
$$
\underbrace{v_{t+1}\left(s_{t}\right)}_{\text {new estimate }}=\underbrace{v_{t}\left(s_{t}\right)}_{\text {current estimate }}-\alpha_{t}\left(s_{t}\right)[\overbrace{v_{t}\left(s_{t}\right)-(\underbrace{r_{t+1}+\gamma v_{t}\left(s_{t+1}\right)}_{\text {TD target } \bar{v}_{t}})}^{\text {TD error } \delta_{t}}]
$$
change form: $v_{t+1}\left(s_{t}\right)-\bar{v}_{t}=\left[1-\alpha_{t}\left(s_{t}\right)\right]\left[v_{t}\left(s_{t}\right)-\bar{v}_{t}\right]$, so it is called Temporal-Difference
Bellman expectation equation
RM算法中其实函数是未知的,用$v_k(s_k’)$代替$v_\pi(s_k’)$
收敛性:由于$v_t(s)$收敛于最大值,故$v_{t+1}(s)-v_t(s)$收敛于0且(sup,理解为带有噪声的)单调
Sarsa
Sarsa:$(s_t,a_t,r_{t+1},s_{t+1},a_{t+1})$
$$
q_{t+1}(s_t,a_t)=q_{t}(s_t,a_t)-\alpha_t(s_t,a_t)[q_{t}(s_t,a_t)-(r_{t+1}+\gamma q_t(s_{t+1},a_{t+1}))]
$$
- 这里的a_t+1是根据policy选的
- policy evaluation
- policy update
- ε-greedy
- 特定目标可以只训练部分visit
Expected Sarsa
$$
q_{t+1}(s_t,a_t)=q_{t}(s_t,a_t)-\alpha_t(s_t,a_t)[q_{t}(s_t,a_t)-(r_{t+1}+\gamma \mathbb E [q_t(s_{t+1},A)])]
$$
- 综合考虑所有a_t+1
n-step Sarsa
$$
q_{t+1}(s_t,a_t)=q_{t}(s_t,a_t)-\alpha_t(s_t,a_t)[q_{t}(s_t,a_t)-\sum_{i=1}^nr ^{i-1}+\gamma^nq_t(s_{t+n},a_{t+n})]
$$
- 综合MC
- 综合variance &bias
Q-learning
use $\pi _b$ (behavior policy)to generate episode${s_0,a_0,r_1,s_1,a_1…}$
for each step:
update q-value
$$
q_{t+1}(s_t,a_t)=q_{t}(s_t,a_t)-\alpha_t(s_t,a_t)[q_{t}(s_t,a_t)-(r_{t+1}+\gamma \max _{a \in A }q_t(s_{t+1},a))]
$$
update policy $\pi_{T,t+1}$
- estimate optimal q
- update do not need π: off-policy
- behavior policy
- target policy
- on-policy: behavior policy=target policy
- off-policy: behavior policy, target policy can be difference ~ exploitation& exploration
- do not need ε-greedy: $\pi_b$ already have exploration
function approximation
v
input: table(discrete) ->function(continues)
- storage
- generalization ability
estimate:$\hat v (s,w)=\phi ^T(s)w$
- w: parameter vector
- We can add dimension to increase accuracy
- we did not use it before because the correspondence rule before is natural
- $\phi (s)$: feature vector of s.
- train to change w
- linear function was widely used before. then $\phi (s)$ can be polynomial basis, Fourier basis.
- difficult to select
- easy to analysis
- can uniform tabular representation $\phi (s_i)=e_i,\nabla _w\hat v(s_i,w)=e_i$
- neural network are widely used nowadays
objective function(true value error)
$J(w)=\mathbb E[v_\pi(S)-\hat v (S,w)]^2$
goal: minimize J(w)
probability distribution of S
- uniform, but some states are more important
- stationary, long-run behavior $d_\pi(s)$
- $d_\pi^T=d_\pi^T P_\pi$ eigenvalue
Bellman error
Projected Bellman error: 投到span$\phi (s)$
Sarsa:
$$
w_{t+1}=w_{t}+\alpha_{t}\left[r_{t+1}+\gamma \hat{q}\left(s_{t+1}, a_{t+1}, w_{t}\right)-\hat{q}\left(s_{t}, a_{t}, w_{t}\right)\right] \nabla_{w} \hat{q}\left(s_{t}, a_{t}, w_{t}\right)
$$
与table比多了$\nabla_{w} \hat{q}\left(s_{t}, a_{t}, w_{t}\right)$
Q-learning
$$
w_{t+1}=w_{t}+\alpha_{t}\left[r_{t+1}+\gamma \max _{a\in A} \hat{q}\left(s_{t+1}, a, w_{t}\right)-\hat{q}\left(s_{t}, a_{t}, w_{t}\right)\right] \nabla_{w} \hat{q}\left(s_{t}, a_{t}, w_{t}\right)
$$
Deep Q-learning(DQN)
network: function
- main network
- target network: fixed for some time and copy main
$$
J=\mathbb{E}\left[\left(R+\gamma \max _{a \in \mathcal{A}\left(S^{\prime}\right)} \hat{q}\left(S^{\prime}, a, w_{T}\right)-\hat{q}(S, A, w)\right)^{2}\right]
$$
experience replay
replay buffer(缓冲区)$\mathcal{B} :=\left{\left(s, a, r, s^{\prime}\right)\right}$
use a mini-batch randomly from B
(S,A)is seemed as index, which assume to be i.i.d. , and we can use it for times, so we collect it and replay. In tabular cases, (S,A) is naturally independent.
$s\to W\to\hat q(s,a_i)$
π
Since s has been continuous, pi must use function to approach.
generate policy greedily from value ->train policy, use metrics(度规) to judge policy.
average state value:
$$
\bar{v}_{\pi}:=\mathbb{E}\left[v_{\pi}(S)\right]=d_sv^s_\pi=\mathbb{E}\left[\sum_{t=0}^{\infty} \gamma^{t} R_{t+1}\right]
$$
- d independent to pi, denote as $d_0,\bar v_\pi^0$
- when interested in v_i, let d=e_i
- d dependent on pi: stationary
average reward
$$
\bar{r}_{\pi} := \sum_{s \in \mathcal{S}} d_{\pi}(s) r_{\pi}(s)=\mathbb{E}\left[r_{\pi}(S)\right]=\lim _{n \rightarrow \infty} \frac{1}{n} \mathbb{E}\left[\sum_{k=1}^{n} R_{t+k}\right]
$$
- can be undiscounted
- $\bar v_\pi=\bar r_\pi +\gamma \bar v_\pi$
$$
\nabla_{\theta} J(\theta)=\sum_{s \in \mathcal{S}} \eta(s) \sum_{a \in \mathcal{A}} \nabla_{\theta} \pi(a \mid s, \theta) q_{\pi}(s, a)
$$
use dx=x ln x , we get$=\mathbb{E}\left[\nabla_{\theta} \ln \pi(A \mid S, \theta) q_{\pi}(S, A)\right]$
to fit ln, we use softmax:
$$
\pi(a \mid s, \theta)=\frac{e^{\phi(s, a, \theta)}}{\sum_{a^{\prime} \in \mathcal{A}} e^{\phi\left(s, a^{\prime}, \theta\right)}}
$$
a neural network can help you do this automatically
- stochastic & exploratory
since $q_\pi$ is unknown
we can use MC (REINFORCE)
on policy
change form: $\theta_{t+1}=\theta_{t}+\alpha \underbrace{\left(\frac{q_{t}\left(s_{t}, a_{t}\right)}{\pi\left(a_{t} \mid s_{t}, \theta_{t}\right)}\right)}_{\beta_{t}} \nabla_{\theta} \pi\left(a_{t} \mid s_{t}, \theta_{t}\right)$ , which maximized (polarize, because the optimistic policy is deterministic) pi, balance exploitation & exploration
Actor-Critic
actor: update policy to act
critic: estimate policy to value
QAC
use TD to estimate $q_\pi$
(calculate q-error and update q_t)
A2C(advanced AC)
baseline
$$
b^{*}(s)=\frac{\mathbb{E}_{A \sim \pi}\left[\left|\nabla_{\theta} \ln \pi\left(A \mid s, \theta_{t}\right)\right|^{2} q(s, A)\right]}{\mathbb{E}_{A \sim \pi}\left[\left|\nabla_{\theta} \ln \pi\left(A \mid s, \theta_{t}\right)\right|^{2}\right]}\approx v_\pi (s)
$$
- does not change E, change Var
advanced function(Zero-centered): $\delta_{\pi} := q_{\pi}(S, A)-v_{\pi}(S)\approx r_{t+1}+\gamma v_t(s_{t+1})-v_t(s_t)$, (have the same expectation ) which is TD error
then we use delta to update both w for v(critic) & θ for π(actor)
Off-policy AC
Off-policy
- 之前的delta 依赖于pi
- importance sample: 用分布p_1估计p_0
- importance weight: $\frac {p_0(x_i)}{p_1(x_i)}$
- In continuous case, we can know $p_0(x_i)$, but we don not know $\mathbb E(X)=\int p_0(x) dx$
- value update can be off-policy as before : 不涉及状态的更新
- $\beta$ can be $\mu$+noise
Deterministic AC (DAC)
之前用了soft max,不是真实的连续输出
实际上输出的也只是每个值的概率
$a^._s=\mu (s;\theta)$ is deterministic ,实际上代替了$\pi^a_s$,本质上都是输入s输出a
$$
J(\theta)=\mathbb{E}\left[v_{\mu}(s)\right]=\sum_{s \in \mathcal{S}} d(s) v_{\mu}(s)
$$
- d independent to pi, denote as $d_0$
- when interested in v_i, let d=e_i
$$
\nabla_{\theta} J(\theta)=\sum_{s \in \mathcal{S}} \rho_{\mu}(s) \nabla_{\theta} \mu(s)\left(\nabla_{\mu (s)} q_{\mu}(s, \mu(s))\right)
$$
- when interested in v_i, let d=e_i
MARL
Multi-Agent Reinforcement Learning
【多智能体强化学习(1-2):基本概念 Multi-Agent Reinforcement Learning】
- fully cooperative setting
- fully competitive setting
- Mixed cooperative & cooperative
- Self -Interested
$A^i_t,R^i_t,S_t,U^i_t ~~return,\pi (a^i|s;\theta ^i)$
$V_i(s_t;\theta ^1…\theta ^n)=\mathbb E[U^i_t|S_t=s_t]$ depend on all theta
convergence收敛:无法让收益更高
Nash equilibrium: While all the other agents’ policy remain the same, certain agent remains the same.
互相影响
partial observation: $o^i$ 第i个的观测
full observation
fully decentralized
- 不收敛
fully centralized:
- Actor-Critic method: $\pi(a^i|\mathbf o;\theta^i),q(\mathbf o,\mathbf a;w^i)$
- slow
Centralized training with decentralized execution
- $\pi(a^i| o^i;\theta^i),q(\mathbf o,\mathbf a;w^i)$

Parameter Sharing: 功能相同
- $\pi(a^i| o^i;\theta^i),q(\mathbf o,\mathbf a;w^i)$